Después de mucho tiempo sin actualizar. Perdonadme pero el montaje de la impresora es mucho más interesante que la documentación del proceso... pues aquí, por fin, he recopilado el trabajo hasta ahora.

Empezamos de 0.
No se si recordáis, pero este era el aspecto que tenía el paquete desembalado. Un amasijo de tuercas, arandelas, tornillos y cables.
Abrumador a primera vista, pero después de unos cuantos días trabajando en ello, pronto el montón de piezas se ha reducido hasta casi desaparecer.
Mecánica:
Lo primero a lo que le hincamos el diente fue a la base, en esencia es simplemente un rectángulo de varillas bien atornilladas y ensambladas en unos esquineros de plástico. Además de algunas tuercas extra para la fijación del marco de aluminio, el motor y la correa.
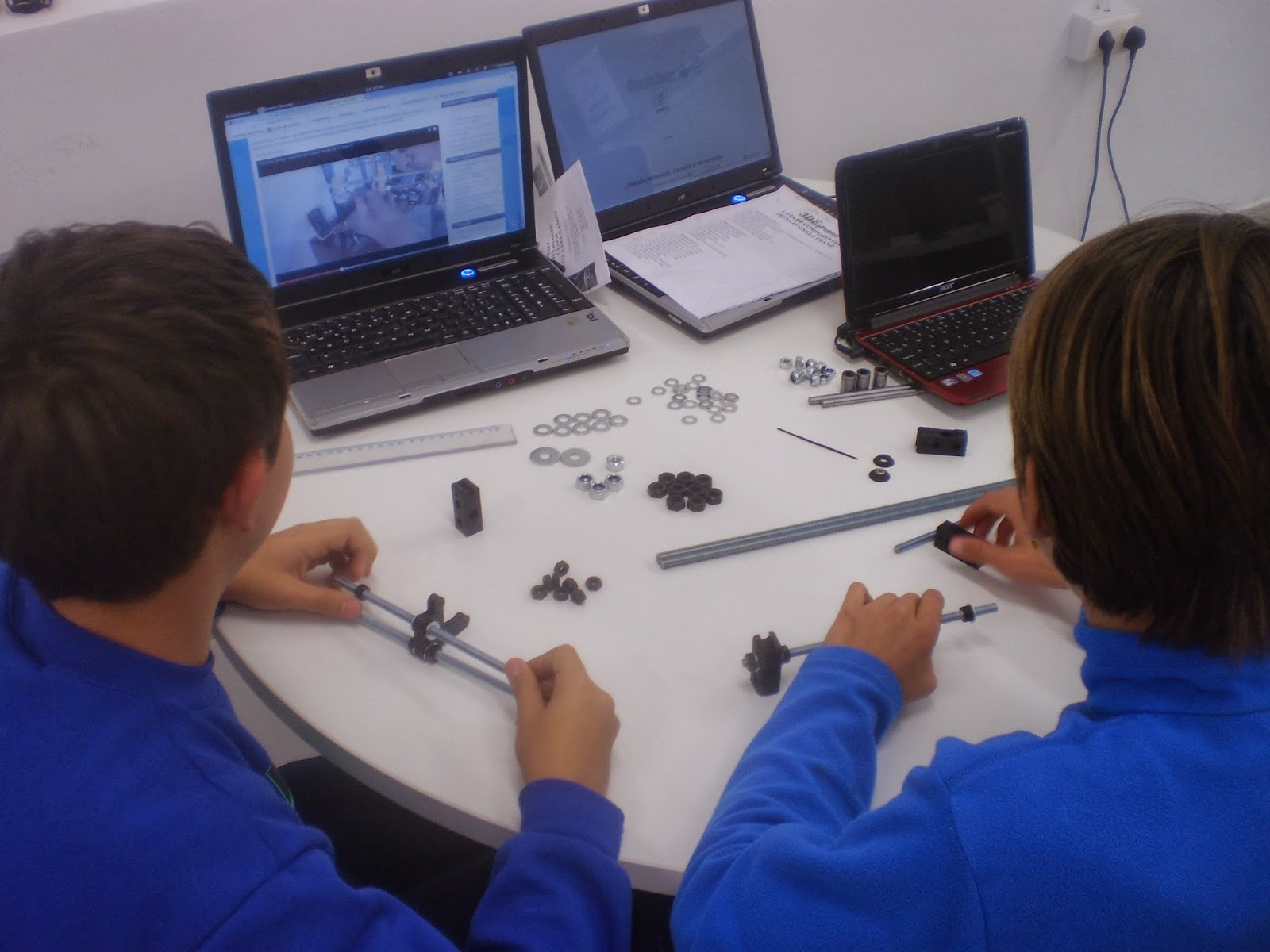
Aquí podemos ver a un par de ingenieros cualificados siguiendo un manual online junto con los materiales necesarios para su montaje.
Y como el proceso de apretar tornillos no tiene ningun misterio (salvo medir 3 o 4 veces las distancias exactas para que cuadre todo). Os ahorrare ese proceso aburrido y veremos las partes ya ensambladas.
En este caso, la base terminada, la estructura de varillas sobre la que se asienta la base de trabajo. El motor y la correa que moverá dicha base bajo el extrusor y que corresponde con el eje Y del espacio tridimensional de trabajo.
En esta foto podemos ver como están terminando de montar el marco vertical, esqueleto principal de la impresora junto con los 2 motores paralelos que moverán el extrusor en el eje Z de trabajo (arriba-abajo).
Aquí tenemos el carril del eje Y que moverá el extrusor horizontalmente. Se puede ver en medio la base de sujeción del mismo enganchada a los rodamientos que le permiten un movimiento fluido a través de la superficie de trabajo junto con el motor que mueve la correa para permitir el desplazamiento.
Aquí tenemos el alimentador a medio montar. Una de las piezas que más trabajo ha costado, pues necesitó pulir algunos de los agujeros y partes de relleno para que encajase bien. La función de esta rueda es mover un tornillo dentado que forzará el hilo de plástico para que entre al extrusor donde se derretirá y fluirá para formar la pieza deseada.
Una vez terminadas todas estas partes y unidas, este es el resultado. Ya tenemos el 90% de la mecánica montada.
Electrónica:
Lo primero fue empalmar los cables de los motores y otros componentes con unos conectores que faciliten la conexión del cableado en los pines de la Ramps (un escudo de Arduino diseñado para facilitar el manejo de los motores y otros periféricos de la impresora 3D).
En este caso no hay mucho misterio, empalmar 2 cables y asegurar la conexion y el aislamiento con funda termoretractil.
Después de eso, abrimos la fuente de alimentación (de PC estándar) que nos dará la potencia necesaria para mover los motores y calentar las resistencias hasta los 150-200º a los que trabaja la impresora.
En este caso, lo poco que necesitamos de la fuente son 2 cables de alimentacion que se conectan a la Ramps directamente (en la fotografia se aprecia en la esquina superior izquierda). Para ello tuvimos que cortar un par de conectores. En este caso ambos a 12v, uno a 8A y otro a 12A.
También aprovechamos para conectar el ventilador que refrigera la electrónica, en la Ramps hay un par de Pines para esa función, pero siguiendo los consejos del manual lo alimentamos directamente de la fuente de alimentación para asegurarnos de que siempre esté refrigerada.
Aqui tenemos con un poco más de detalle la placa Arduino+Ramps (la roja que se ve es Ramps que oculta completamente la Arduino que hay debajo).
Podemos observar a la derecha la conexión de datos con el PC (USB).
La alimentación para tareas de potencia (cables amarillos y negros de la fuente de alimentación).
4 grupos de 4 cables (rojo,negro,azul,morado). Cada grupo de 4 va a los motores (2 cables por cada una de las dos bobinas del motor).
1Motor del eje X, 1 Motor del eje Y, 2 Motores paralelos del eje Z, 1 motor del alimentador de plástico para el extrusor.
Abajo a la izquierda, hay 3 grupos de dos cables (rojo y negro)que corresponden a los finales de carrera que garantizaran que los motores no se fuerzen fuera de los limites de su recorrido. Aunque el montaje perfecto seria con 6 finales de carrera, se utilizan comúnmente solo 3 en uno de los laterales, y el otro lateral se fija mediante software con un contador de pasos.
Aquí vemos en detalle el problema que nos tendrá prácticamente parados 5 o 10 días hasta que llegue el reemplazo. Es un Pololu, un driver para un motor paso a paso A4988 que aunque no se aprecia defecto alguno y la soldaduras parecen estar bien... no funciona.
En la imagen anterior podemos ver otros 3 insertados en la Ramps, son las pequeñas piezas que tienen un disipador plateado encima. Este debería controlar el eje Z así que hasta que no tengamos un repuesto no podemos imprimir algo de prueba ni seguir con la calibración, pues siempre tendremos un eje parado.
Esta es una foto detalle del alimentador, donde se aprecia como entra el filamento de plastico al ritmo de la rueda dentada.
Y por ultimo el estado actual de la impresora montada. Solo faltaría por poner los finales de carrera en su sitio y acomodar los cables a través del marco para que no interfieran con el movimiento. Pero como todavía estamos de pruebas, todo está suelto para facilitar la manipulación de cada componente.
Se puede apreciar la base caliente(cuadrado rojo) que mantendrá la pieza a la temperatura optima para que todo encaje bien.
Y por ultimo el logo. Despues de un pequeño debate decidimos personalizarla en estos días de "parón" obligado. Este es el reverso del espejo, nos falta limpiar la capa reflectante para que se quede totalmente transparente por el otro lado.
Este espejo ira sobre la cama caliente para que las piezas no toquen la base roja que es bastante delicada.
BonusTrack: